研究内容
実時間最適化を活用した制御に関する研究
近年のマイクロプロセッサの高速化や最適化アルゴリズムの発展に伴い,制御対象の内部状態や外部入力などの情報をもとに,制御器ゲインの変更や目標軌道の再計画をオンラインで実行することが可能となっています.そのようなオンラインで調節可能な時変制御器を用いることにより,従来の固定時不変制御器では達成困難な性能・機能を有する制御システムを構築することが可能となると期待できます.本研究室では,以下の研究課題に取り組んでいます.
- ロバストモデル予測制御アルゴリズムの構築
- モデル予測サーボ制御アルゴリズムの構築
- 状態リセットの活用によるサーボ性能の最適化
- 状態リセットによる外乱抑圧性能の最適化
- 能動的耐故障制御アルゴリズムの構築

ロバスト制御に関する研究
制御アルゴリズムの設計は,通常制御する対象の数式モデルに対して行われます.このとき数式モデルに誤差が含まれることは避けられません.また,制御対象となる機械システムの動的な特性は,稼動状態や経年変化により大きく変化する場合があります.このような,モデル化誤差や制御対象の動的特性の変動の下で,システムの性能劣化を最小に抑える制御系の構成法について研究を行っています.
- 線形行列不等式(LMI)に基づく制御システム設計
- ゲインスケジュールド制御
- 入力拘束システムのAnti-windup制御

機械システムへの制御応用に関する研究
構築した制御アルゴリズムを機械システムの制御問題に適用し,その有効性を検証しています.以下では,そのいくつかをご紹介致します.
- 車両の障害物回避支援制御
以下の図は,モデル予測追従制御アルゴリズムを,車両の障害物回避支援制御問題に適用したHuman-in-the-loopシミュレーションの結果を表しています.障害物に関する予見情報を用いることで,ドライバのハンドル操作を適切に修正し,障害物回避を実現しています.
モデル予測制御による車両の障害物回避支援 - 車両の旋回運動安定化制御
以下の図は,アクティブ前輪操舵制御システムを備えた車両の旋回運動に関する数値シミュレーションの結果を表しています.提案法では,タイヤの摩擦力飽和に対してロバストな特性を持つように制御系が構成されています. 提案法では,旋回時にカウンターステアが自動的に生成されており,滑りやすい路面上であるにもかかわらず,スピンの発生を防止しつつ,安定な旋回運動が実現されています.
ロバスト制御による車両旋回運動安定化制御 - 二慣性系の回転角速度制御
以下の図は,状態リセット付き可変ゲイン制御による二慣性系の回転角速度制御実験の結果です.制御入力トルクTに関する振幅制限の下で,負荷軸の回転角速度yは,オーバーシュートを生じることなくほぼ最短時間で時変目標信号rに追従していることが確認出来ます.また,モータ軸と負荷軸を接続する板ばねのねじれ角は,速やかに小さな値に収束しています.
二慣性系の回転角速度制御実験結果 - パイロットによる自励振動(PIO)の抑制制御
航空機で用いられている操舵アクチュエータには一般に応答速度に制限があり,これがPIOと呼ばれる航空機制御系の振動現象をしばしば引き起こす原因となることが知られています. 以下の図は,提案モデル予測サーボ制御手法を,PIOの抑制制御に用いた結果を表しています. 提案法では,操舵アクチュエータの応答速度制限の下で,パイロットが操縦桿を介して与える目標ピッチレートに対し,機体ピットレートが出来るだけ速やかに追従するように,モデル予測追従制御系を構成しています.一般的な線形制御器を用いた場合にはPIOが発生していますが,提案法を用いた場合には,PIOの発生が抑制されていることが確認できます.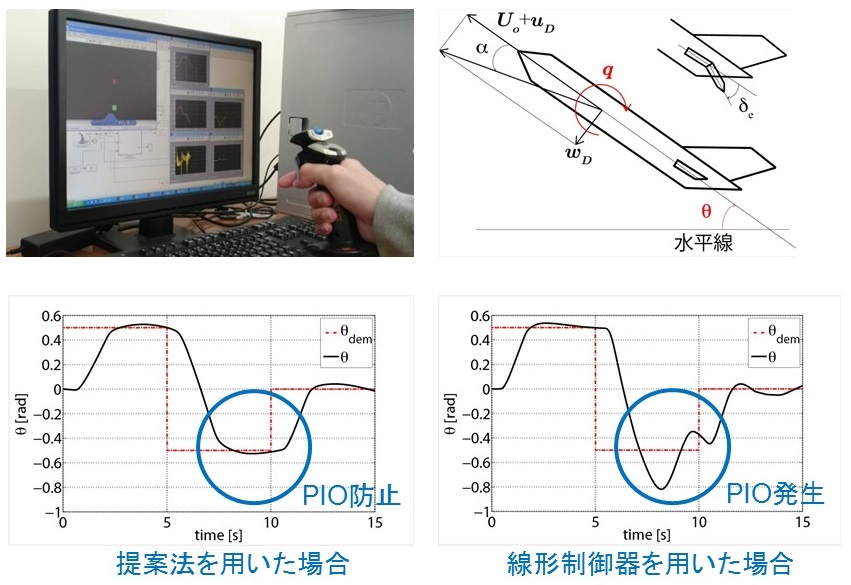
PIO抑制制御Human-in-the-loopシミュレーション結果